El movimiento tridimensional de un sólido rígido es mucho más complejo que el movimiento plano. Los puntos del cuerpo se desplazan en el espacio tridimensional y además las direcciones de los vectores velocidad angular y aceleración angular varían con el tiempo. Recordemos que en movimiento plano de un sólido rígido las direcciones de los vectores y no cambian, manteniéndose siempre perpendiculares al plano del movimiento.
En este caso el tratamiento vectorial no sólo es útil, sino estrictamente necesario para el estudio del movimiento tridimensional de un sólido rígido.
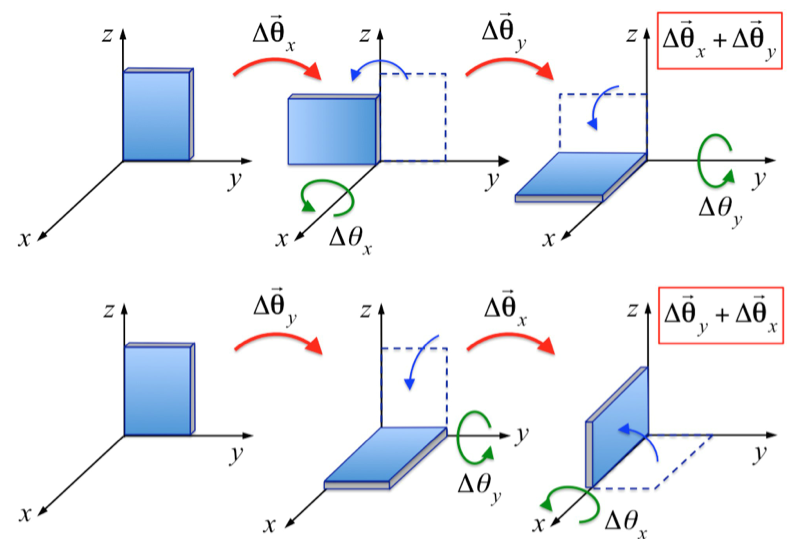
Antes de analizar el movimiento tridimensional de un sólido rígido o bien el caso particular de su rotación en torno a un punto fijo, vamos a considerar algunos aspectos de las rotaciones de cuerpos rígidos en tres dimensiones. De este modo nos familiarizaremos con algunas propiedades de los desplazamientos rotacionales.
En el caso de la rotación en torno a un punto fijo, cada punto del sólido se mueve en una superficie esférica centrada en ese punto.