Una nave superficial autónoma (USV, del inglés Uncrewed Surface Vessel o Unmanned Surface Vehicle) es un vehículo robótico que navega autónomamente, aunque también puede ser manejado a control remoto. Este tipo de plataformas se han desarrollado en tiempos recientes por sus múltiples aplicaciones como, por ejemplo, la vigilancia y control de puertos, parques eólicos marinos, gasoductos o procesos costeros. Existe una gran oferta comercial pero a día de hoy con precios similares a un coche utilitario y el problema es que se suelen bloquear y hay que rescatarlos.
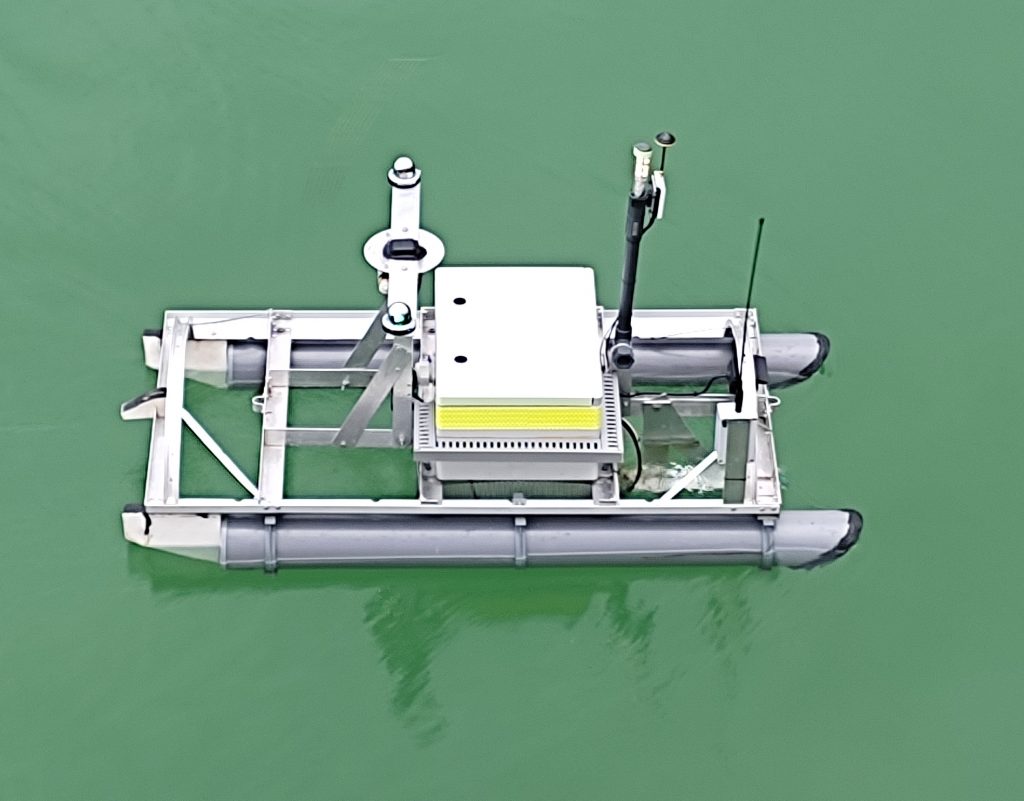
Para trabajar en medios costeros y lagunas se necesita un equipo pequeño, que pueda transportarse en el maletero de un coche; modular, para poder añadir diferentes sensores o sistemas; de propulsión eléctrica, para facilitar su mantenimiento y reparación; y que no se quede enredado con la vegetación.
Dado que las plataformas disponibles no cumplen todos los requisitos para estudiar los lagos con densa vegetación en Alicante, se ha desarrollado un USV y se han probado en los lagos de Rabasa en Alicante. Antiguas canteras de arcilla abandonadas de la industria de tejas y ladrillos llenas con las aguas del acuífero de San Vicente del Raspeig. La plataforma está basada en Arduino, cuenta con Ecosonda, GPS, conexión Bluetooth y es controlada a distancia.
El USV se utilizará para la búsqueda de surgencias submarinas en la costa de Alicante, encontrándose en la actualidad en proceso de desarrollo.