Durante el mes de enero de 2023 se realizó una campaña de sondeos manuales en el Bajo Segura (Alicante) y la Albufera de Valencia, con el objetivo de probar las posibilidades de obtener datos mediante sondeos manuales y si se podía penetrar lo suficiente para tener muestras de los últimos 6000 años.
La primera prueba se realizó en las proximidades del Cabezo del Estaño de Guardamar de Segura, en las proximidades de un asentamiento fortificado fenicio anterior al puerto fenicio debajo del yacimiento de la Rábita Califal de las dunas de Guardamar. Conocido como la ciudad portuaria de la Fonteta.
En el caso del yacimiento del Cabezo del Estaño, el puerto, o pequeña zona de amarre, debería estar situada al Este del yacimiento pero no ha sido localizado hasta la fecha. En nuestro caso, se realizó un sondeo en la parte central del valle, no con el objetivo de localizar el puerto, sino de obtener un registro lo más completo posible de la zona. El sondeo manual llegó a los 5 m de profundidad y se encuentra en la actualidad en fase de estudio.
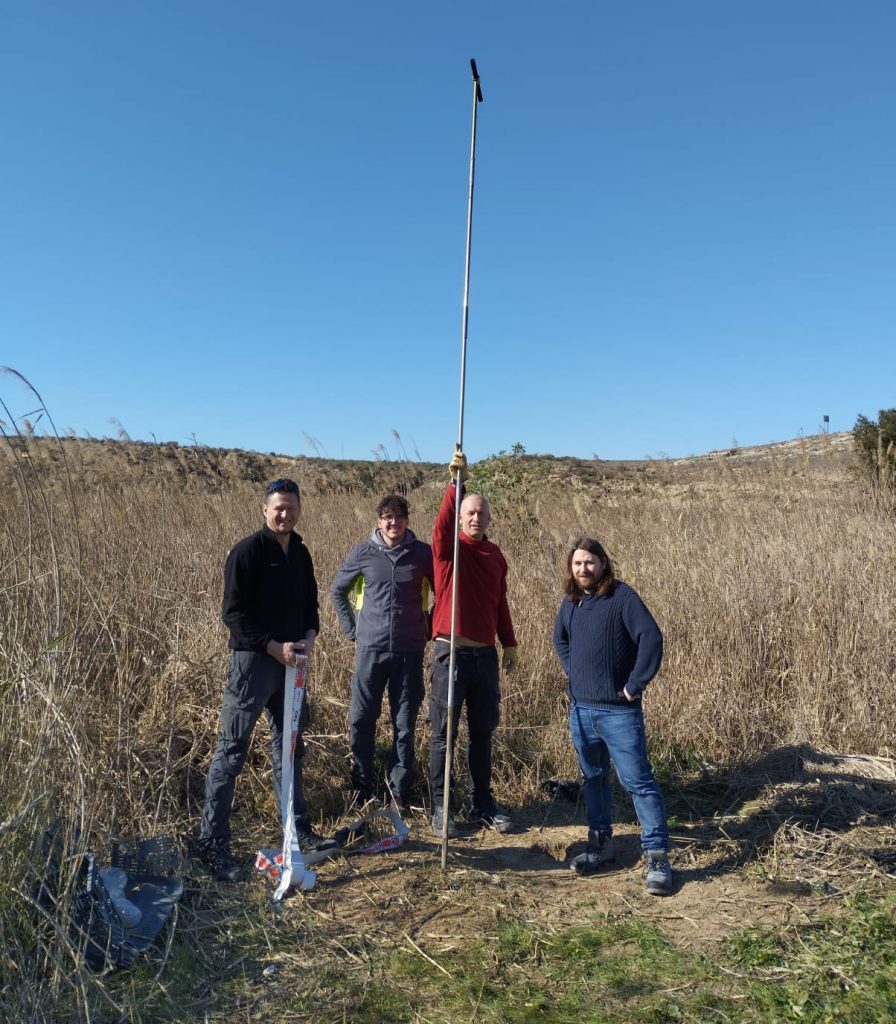
Sondeo manual en las cercanías de Cabezo del Estaño. En la foto de izquierda a derecha, Rogerio Portantiolo Manzolli (Universidad Autónoma de Madrid), Claudi Blasco (alumno Universidad de Alicante), José Enrique Tent-Manclús (Universidad de Alicante), Carlos Arteaga Cardineau (Universidad Autónoma de Madrid)
En la campaña participaron: Rogerio Portantiolo Manzolli (Universidad Autónoma de Madrid), Claudi Blasco (alumno Universidad de Alicante), José Enrique Tent-Manclús (Instituto “Ramón Margalef” de la Universidad de Alicante), Carlos Arteaga Cardineau (Universidad Autónoma de Madrid), Juana Jordá Guijarró (Instituto “Ramón Margalef” de la Universidad de Alicante), José Navarro Pedreño (Universidad Miguel Hernández) y Manuel Miguel Jordán Vidal (Universidad Miguel Hernández).

Estos trabajos se enmarcan dentro del proyecto MOLICO-CV para localizar riesgos en zonas costeras de la Comunidad Valenciana y se encuentra financiado por ThinkinAzul de la Generalitat Valenciana.